| Пропорциональное управление – залог тишины!
Какая задача ставится перед нашей системой управления? Да чтобы пропеллеры зря не вращались, чтобы зависимость скорости вращения была от температуры. Чем горячее девайс - тем быстрей вращается вентилятор. Логично? Логично! На том и порешим.
|
Заморачиваться с микроконтроллерами конечно можно, в чем то будет даже проще, но совершенно не обязательно. На мой взгляд проще сделать аналоговую систему управления - не надо будет заморачиваться с программированием на ассемблере.
Будет и дешевле, и проще в наладке и настройке, а главное любой при желании сможет расширить и надстроить систему по своему вкусу, добавив каналов и датчиков. Всё что от тебя потребуется это лишь несколько резисторов, одна микросхема и термодатчик. Ну а также прямые руки и некоторый навык пайки. 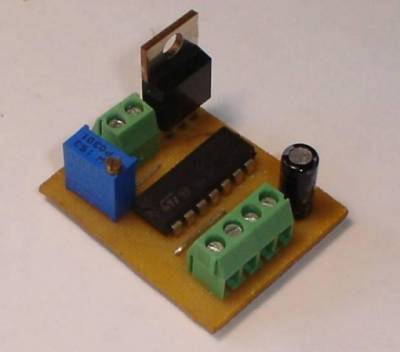
Состав:
Чип резисторы размера 1206. Ну или просто купить в магазине – средняя цена одного резистора 30 копеек. В конце концов никто не мешает тебе чуток подправить плату, чтобы на место чип резисторов впаять обычные, с ножками, а уж их в любом старом транзисторном телевизоре навалом.
Многооборотный переменный резистор примерно на 15кОм.
Также потребуется чип конденсатор размера 1206 на 470нф (0.47мкФ)
Любой электролитический кондер напряжением от 16 вольт и выше и емкостью в районе 10-100мкФ.
Винтовые клеммники по желанию – можно просто припаять провода к плате, но я поставил клеммник, чисто по эстетическим соображениям – девайс должен выглядеть солидно.
В качестве силового элемента, который и будет управлять питанием кулера, мы возьмем мощный MOSFET транзистор. Например IRF630 или IRF530 его иногда можно выдрать из старых блоков питания от компа. Конечно для крохотного пропеллера его мощность избыточна, но мало ли, вдруг ты захочешь туда что-нибудь помощней всунуть?
Температуру будем щупать прецезионным датчиком LM335Z он стоит не более десяти рублей и дефицита из себя не представляет, да и заменить его при случае можно каким-нибудь терморезистором, благо он тоже не является редкостью.
Основной деталью, на которой основано все, является микросхема представляющая из себя четыре операционных усилителя в одном корпусе – LM324N очень популярная штука. Имеет кучу аналогов (LM124N, LM224N, 1401УД2А) главное убедись, чтобы она была в DIP корпусе (такой длинный, с четырнадцатью ножками, как на рисунках).
Замечательный режим – ШИМ 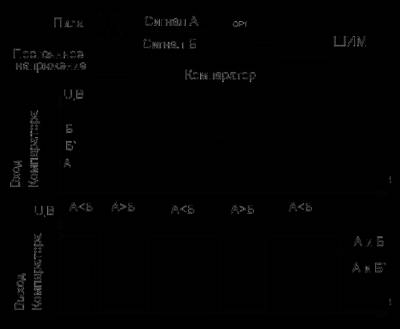
Образование ШИМ сигнала
Чтобы вентилятор вращался медленней достаточно снизить его напряжение. В простейших реобасах это делается посредством переменного резистора, который ставят последовательно с двигателем. В итоге, часть напряжения упадет на резисторе, а на двигатель попадет меньше как результат – снижение оборотов. Где падляна, не замечаешь? Да засада в том, что энергия выделившаяся на резисторе преобразуется не во что нибудь, а в обычное тепло. Тебе нужен обогреватель внутри компа? Явно нет! Поэтому мы пойдем более хитрым способом – применим широтно-импульсную модуляцию aka ШИМ или PWM. Страшно звучит, но не бойся, тут все просто. Представь, что двигатель это массивная телега. Ты можешь толкать его ногой непрерывно, что равносильно прямому включению. А можешь двигать пинками – это и будет ШИМ. Чем длинней по времени толчок ногой тем сильней ты разгоняешь телегу.
При ШИМ питании на двигатель идет не постоянное напряжение, а прямоугольные импульсы, словно ты включаешь и выключаешь питание, только быстро, десятки раз в секунду. Но двигатель имеет неслабую инерцию, а еще индуктивность обмоток, поэтому эти импульсы как бы суммируются между собой – интегрируются. Т.е. чем больше суммарная площадь под импульсами в единицу времени, тем большее эквивалентное напряжение идет на двигатель. Подаешь узенькие, словно иголки, импульсы – двигатель еле вращается, а если подать широкие, практически без просветов, то это равносильно прямому включению. Включать и выключать двигатель будет наш MOSFET транзистор, а формировать импульсы будет схема.
Пила + прямая = ?
Столь хитрый управляющий сигнал получается элементарно. Для этого нам надо в компаратор загнать сигнал пилообразной формы и сравнить его с каким либо постоянным напряжением. Смотри на рисунок. Допустим у нас пила идет на отрицательный выход компаратора, а постоянное напряжение на положительный. Компаратор складывает эти два сигнала, определяет какой из них больше, а потом выносит вердикт: если напряжение на отрицательном входе больше чем на положительном, то на выходе будет ноль вольт, а если положительное будет больше отрицательного, то на выходе будет напряжение питания, то есть около 12 вольт. Пила у нас идет непрерывно, она не меняет свою форму со временем, такой сигнал называется опорным.
А вот постоянное напряжение может двигаться вверх или вниз, увеличиваясь или уменьшаясь в зависимости от температуры датчика. Чем выше температура датчика, тем больше напряжение с него выходит, а значит напруга на постоянном входе становится выше и согласно этому на выходе компаратора импульсы становятся шире, заставляя вентилятор крутиться быстрее. Это будет до тех пор, пока постоянное напряжение не перекроет пилу, что вызовет включение двигателя на полные обороты. Если же температура низкая, то и напряжение на выходе датчика низкое и постоянная уйдет ниже самого нижнего зубчика пилы, что вызовет прекращение вообще каких либо импульсов и двигатель вообще остановится. Загрузил, да? ;) Ничего, мозгам полезно работать.
Температурная математика

Регулирование
В качестве датчика у нас используется LM335Z. По сути это термостабилитрон. Прикол стабилитрона в том, что на нем, как на ограничительном клапане, выпадает строго определенное напряжение. Ну, а у термостабилитрона это напряжение зависит от температуры. У LM335го зависимость выглядит как 10mV * 1 градус по Kельвину. Т.е. отсчет ведется от абсолютного нуля. Ноль по Цельсию равен двести семьдесят три градуса по Кельвину. А значит, чтобы получить напряжение выходящее с датчика, скажем при плюс двадцати пяти градусах Цельсия, то нам надо к двадцати пяти прибавить двести семьдесят три и умножит полученную сумму на десять милливольт.
(25+273)*0.01 = 2,98В
При других температурах напряжение будет меняться не сильно, на те же 10 милливольт на градус. В этом заключается очередная подстава:
Напряжение с датчика меняется несильно, на какие то десятые доли вольта, а сравнивать его надо с пилой у которой высота зубьев достигает аж десяти вольт. Чтобы получить постоянную составляющую напрямую с датчика на такое напряжение нужно нагреть его до тысячи градусов - редкостная лажа. Как тогда быть?
Так как у нас температура все равно вряд ли опустится ниже двадцати пяти градусов, то все что ниже нас не интересует, а значит можно из выходного напряжения с датчика выделить лишь самую верхушку, где происходят все изменения. Как? Да просто вычесть из выходного сигнала две целых девяносто восемь сотых вольта. А оставшиеся крохи умножить на коэффициент усиления, скажем, на тридцать.
В аккурат получим порядка 10 вольт на пятидесяти градусах, и вплоть до нуля на более низких температурах. Таким образом, у нас получается своеобразное температурное "окно” от двадцати пяти до пятидесяти градусов в пределах которого работает регулятор. Ниже двадцати пяти – двигатель выключен, выше пятидесяти – включен напрямую. Ну а между этими значениями скорость вентилятора пропорциональна температуре. Ширина окна зависит от коэффициента усиления. Чем он больше, тем уже окно, т.к. предельные 10 вольт, после которых постоянная составляющая на компараторе будет выше пилы и мотор включится напрямую, наступят раньше.
Но ведь мы не используем ни микроконтроллера, ни средства компьютера, как же мы будем делать все эти вычисления? А тем же операционным усилителем. Он ведь не зря назван операционным, его изначальное назначение это математические операции. На них построены все аналоговые компьютеры - потрясающие машины, между прочим.
Чтобы вычесть одно напряжение из другого нужно подать их на разные входы операционного усилителя. Напряжение с термодатчика подаем на положительный вход, а напряжение которое надо вычесть, напряжение смещения, подаем на отрицательный. Получается вычитание одного из другого, а результат ещё и умножается на огромное число, практически на бесконечность, получился еще один компаратор.
Но нам же не нужна бесконечность, так как в этом случае наше температурное окно сужается в точку на температурной шкале и мы имеем либо стоящий, либо бешено вращающийся вентилятор, а нет ничего более раздражающего чем включающийся и выключающийся компрессор совкового холодильника. Аналог холодильника в компе нам также не нужен. Поэтому будем понижать коэффициент усиления, добавляя к нашему вычитателю обратные связи.
Суть обратной связи в том, чтобы с выхода сигнал загнать обратно на вход. Если напряжение с выхода вычитается из входного, то это отрицательная обратная связь, а если складывается, то положительная. Положительная обратная связь увеличивает коэффициент усиления, но может привести к генерации сигнала (автоматчики называют это потерей устойчивости системы). Хороший пример положительной обратной связи с потерей устойчивости это когда ты включаешь микрофон и тычешь им в динамик, обычно сразу же раздается противный вой или свист – это и есть генерация. Нам же надо уменьшить коэффициент усиления нашего операционника до разумных пределов, поэтому мы применим отрицательную связь и заведем сигнал с выхода на отрицательный вход.
Соотношение резисторов обратной связи и входа дадут нам коэффициент усиления влияющий на ширину окна регулирования. Я прикинул, что тридцати будет достаточно, ты же можешь пересчитать под свои нужды. Пила
Осталось изготовить пилу, а точнее собрать генератор пилообразного напряжения. Состоять он будет из двух операционников. Первый за счет положительной обратной связи оказывается в генераторном режиме, выдавая прямоугольные импульсы, а второй служит интегратором, превращая эти прямоугольники в пилообразную форму.
Конденсатор в обратной связи второго операционного усилителя определяет частоту импульсов. Чем меньше емкость конденсатора, тем выше частота и наоборот. Вообще в ШИМ генерации чем больше тем лучше. Но есть один косяк, если частота попадет в слышимый диапазон (20 до 20 000 гц) то двигатель будет противно пищать на частоте ШИМ, что явно расходится с нашей концепцией бесшумного компьютера.
А из добиться из данной схемы частоты больше чем пятнадцать килогерц мне не удалось – звучало отвратительно. Пришлось пойти в другую сторону и загнать частоту в нижний диапазон, в район двадцати герц. Движок начал чуток вибрировать, но это не слышно и ощущается только пальцами.
Схема. 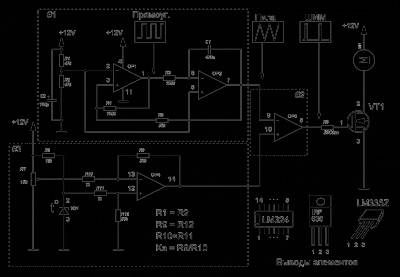
Такс, с блоками разобрались, пора бы и на схемку поглядеть. Думаю большинство уже догадались что тут к чему. А я все равно поясню, для большей ясности. Пунктиром на схеме обозначены функциональные блоки.
Блок #1
Это генератор пилы. Резисторы R1 и R2 образуют делитель напряжения, чтобы подать в генератор половину питающего, в принципе они могут быть любого номинала, главное, чтобы были одинаковыми и не сильно большого сопротивления, в пределах сотни килоом. Резистор R3 на пару с конденсатором С1 определяют частоту, чем меньше их номиналы тем больше частота, но опять повторюсь, что мне не удалось вывести схему за звуковой диапазон, поэтому лучше оставь как есть. R4 и R5 это резисторы положительной обратной связи. Также они влияют на высоту пилы относительно нуля. В данном случае параметры оптимальные, но если не найдешь таких же то можно брать примерно плюс минус килоом. Главное соблюдать пропорцию между их сопротивлениями примерно 1:2. Если сильно снизить R4 то придется снизить и R5.
Блок #2
Это блок сравнения, тут происходит формирование ШИМ импульсов из пилы и постоянного напряжения.
Блок #3
Это как раз схема устраивающая вычисление температуры. Напряжение с термодатчика VD1 подается на положительный вход, а на отрицательный вход подается напряжение смещения с делителя на R7. Вращая ручку подстроечного резистора R7 можно сдвигать окно регулирования выше или ниже по температурной шкале.
Резистор R8 может быть в пределах 5-10кОм больше нежелательно, меньше тоже – может сгореть термодатчик. Резисторы R10 и R11 должны быть равны между собой. Резисторы R9 и R12 также должны быть равны между собой. Номинал резисторов R9 и R10 может быть в принципе любым, но надо учитывать, что от их отношения зависит коэффициент усиления определяющий ширину окна регулирования. Ku = R9/R10 исходя из этого соотношения можно выбирать номиналы, главное, чтобы он был не меньше килоома. Оптимальным, на мой взгляд, является коэффициент равный 30, что обеспечивается резисторами на 1кОм и 30кОм.
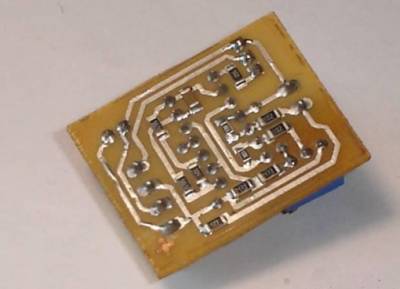
Монтаж 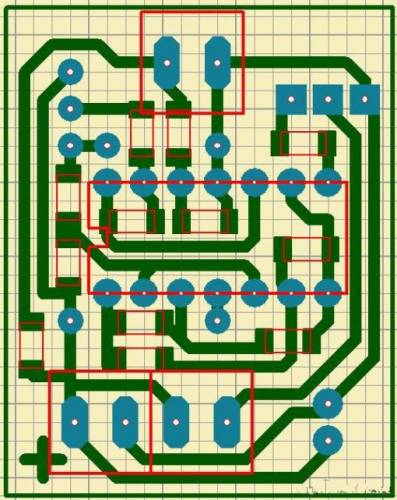
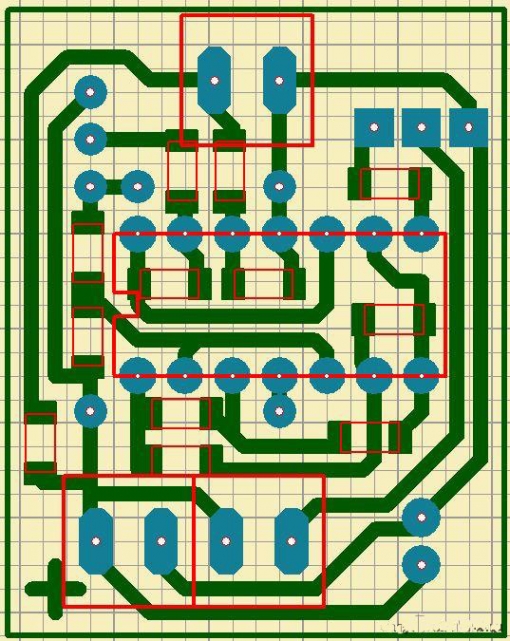
Печатная плата
Девайс выполнен печатным монтажом, чтобы быть как можно компактней и аккуратней. Рисунок печатной платы в виде Layout файла выложен тут же на сайте, программу Sprint Layout 5.1 для просмотра и моделирования печятных плат можно скачать от сюда

Сама же печатная плата выполняется на раз-два посредством лазеро-утюжной технологии.
Когда все детали будут в сборе, а плата вытравлена, то можно приступать к сборке. Резисторы и конденсаторы можно припаивать без опаски, т.к. они почти не боятся перегрева. Особую осторожность следует проявить с MOSFET транзистором.
Дело в том, что он боится статического электричества. Поэтому прежде чем его доставать из фольги, в которую Вам его должны завернуть в магазине, рекомендую снять с себя синтетическую одежду и коснуться рукой оголенной батареи или крана на кухне. Микруху можно перегреть, поэтому когда будешь паять ее, то не держи паяльник на ножках дольше пары секунд. Ну и еще, напоследок, дам совет по резисторам, а точнее по их маркировке. Видишь цифры на его спинке? Так вот это сопротивление в омах, а последняя цифра обозначает число нулей после. Например 103 это 10 и 000 то есть 10 000 Ом или 10кОм.
Апгрейд дело тонкое.
Если, например, захочешь добавить второй датчик для контроля другого вентилятора, то совершенно не обязательно городить второй генератор, достаточно добавить второй компаратор и схему вычисления, а пилу подать из одного и того же источника. Для этого, конечно, придется перерисовать рисунок печатной платы, но я не думаю, что для тебя это составит большого труда.
Автор: DI HALT
Нажмите на баннер ниже, чтобы скачать.
|
|
|